滚动信息2
发布时间:2026-06-11 16:55:28
摘 要
为提高道路检查中路表病害发现效率,本文以2000张道路表面图像为样本,采用YOLOv11L模型识别纵向裂缝、横向裂缝、网裂/龟裂、坑槽和道路修补区域等目标。数据按1600张训练图像和400张测试图像划分,标注采用YOLO格式。训练结果显示,模型在第100轮取得较优结果,Precision为66.21%,Recall为71.58%,mAP@0.5为75.40%,mAP@0.5:0.95为50.12%。从曲线和可视化结果看,模型能够识别多数路表病害,但对细长裂缝和少样本目标仍存在定位偏差。研究认为,YOLOv11L适合用于道路检查图像初筛,并需与人工复核和养护记录结合使用。
关键词:道路检查;路表病害;YOLOv11L;目标检测;智能养护
1 引言
道路表面病害通常不是一次性形成的,裂缝、坑槽和修补边缘会随着车辆荷载、雨水侵蚀、温差变化逐渐发展。人工检查能够发现明显破损,但在批量图片整理时容易受经验和光照影响,尤其是细长裂缝、浅色裂缝与路面纹理混在一起时,漏检和误判都较常见。近年来,道路病害识别逐渐从人工判读转向图像检测模型辅助处理。
近两年,国内外研究继续围绕YOLO系列开展道路缺陷检测。罗臻等提出改进YOLO11Ln以提升复杂场景中的道路缺陷识别能力[1];侯勇严等将注意力机制和特征金字塔用于路面病害检测[2];殷波基于YOLOv11结构改进路面损伤检测算法,并关注模型复杂度和部署效率[3]。国外研究中,Zhang等使用改进YOLOv11进行道路损伤识别[4],Lin等提出YOLO11L-WLBS用于路面缺陷检测[5]。这些研究说明,单阶段检测模型已成为道路检查的重要技术路线,但不同数据集和采集条件下仍需进行针对性验证。
本文围绕YOLO11L在现有道路图像中的表现展开分析。重点包括:数据类别分布是否均衡,模型训练是否收敛,PR曲线和可视化结果能否支撑道路检查应用。
2 数据集与类别定义
本研究使用道路表面图像2000张,其中训练集1600张,测试集400张。数据集采用YOLO目标检测格式,每张图像对应一个txt标注文件,标注内容包括类别编号、目标框中心坐标以及宽高。训练图中的D00、D10、D20、D40和Repair分别对应纵向裂缝、横向裂缝、网裂/龟裂、坑槽和道路修补区域。
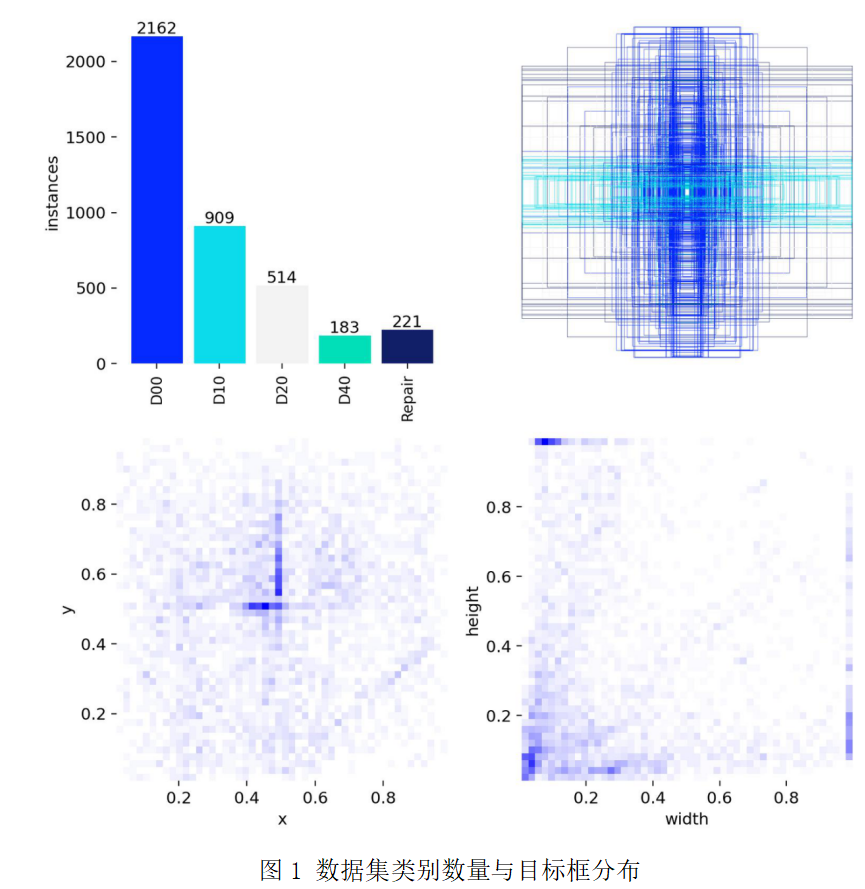
图1显示,纵向裂缝实例最多,为2162个;横向裂缝909个,网裂/龟裂514个,坑槽183个,道路修补区域221个。类别数量差异较明显,模型更容易学习裂缝类特征,而坑槽和修补区域样本偏少。目标框位置主要集中在图像中部,符合前视道路采集特点;宽高分布显示,大量裂缝目标呈细长形态,这会增加边界框回归难度。
3 模型与实验设置
YOLOv11L属于YOLOv11L系列中参数规模较大的检测模型,特征表达能力强于轻量版本,适合处理纹理复杂、尺度差异明显的道路图像。本文将输入尺寸设为640×640,训练100轮,batch size为1,使用预训练权重初始化;优化器为auto配置,初始学习率为0.01,权重衰减为0.0005。训练过程中保留常规数据增强,以提高模型对不同路面背景的适应能力。
评价指标采用Precision、Recall、mAP@0.5和mAP@0.5:0.95。Precision反映误检控制能力,Recall反映真实病害检出能力。mAP@0.5用于观察总体检测效果,mAP@0.5:0.95对边界框位置要求更高,更能体现病害定位质量。道路检查既要尽量找出病害,也要避免位置偏差过大,因此本文同时分析检出能力和定位精度。
4 实验结果与分析
4.1 训练过程
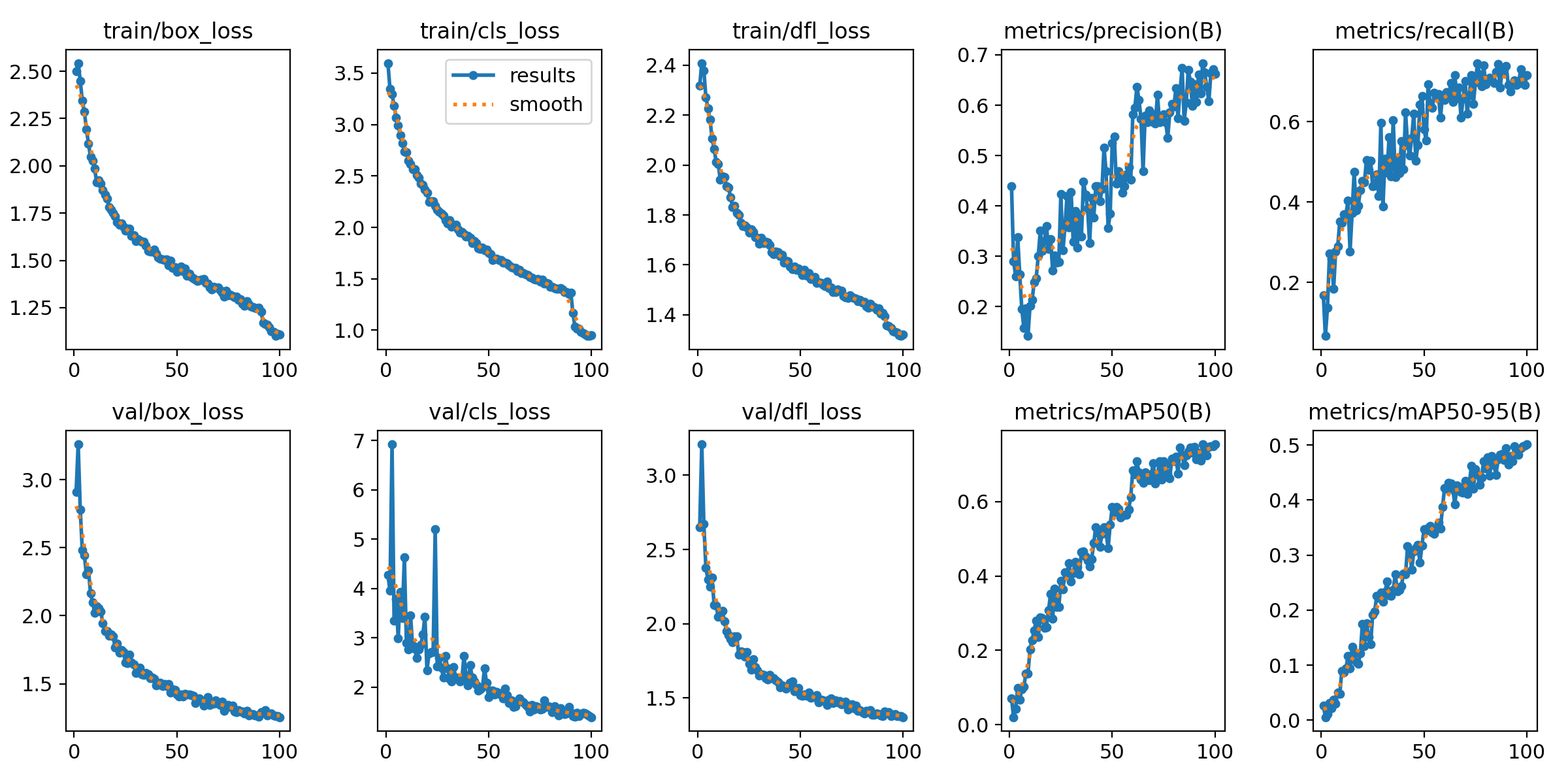
图2 YOLO11L训练损失与验证指标变化
图2中,训练前期box loss、cls loss和dfl loss下降较快,说明模型较快学习到裂缝、坑槽和修补区域的基本视觉特征。后期各项曲线趋于平稳,未出现明显发散。mAP@0.5:0.95始终低于mAP@0.5,说明模型能找到目标,但在高重合阈值下框选仍有误差。这与道路病害边界不规则、裂缝细长、路面纹理干扰强有关。
4.2 整体指标
根据results.csv记录,YOLO11L在第100轮取得最优综合结果:Precision为66.21%,Recall为71.58%,mAP@0.5为75.40%,mAP@0.5:0.95为50.12%,验证box loss为1.2550。这些数值说明模型具备道路病害识别基础,但仍不是完全稳定的工程模型。Recall高于Precision,表明模型更倾向于保留疑似病害,适合初筛。
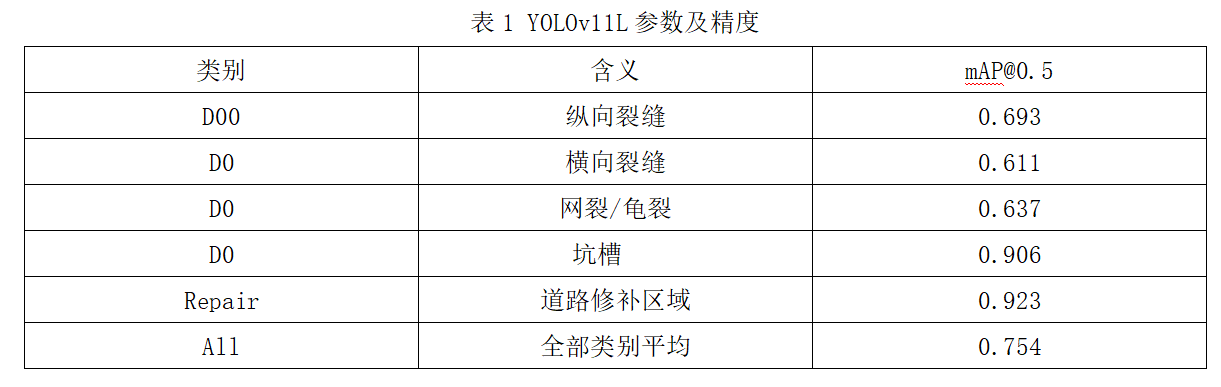
如表1所示,YOLOv11l的全部类别平均mAP@0.5为0.754。其中,道路修补区域和坑槽识别效果较好,分别达到0.923和0.906;纵向裂缝、横向裂缝、网裂/龟裂分别为0.693、0.611和0.637,低于块状病害目标。结果说明,模型对边界清晰、纹理差异明显的目标更敏感,而对细长裂缝和弱纹理目标仍存在识别难度。
4.3可视化结果
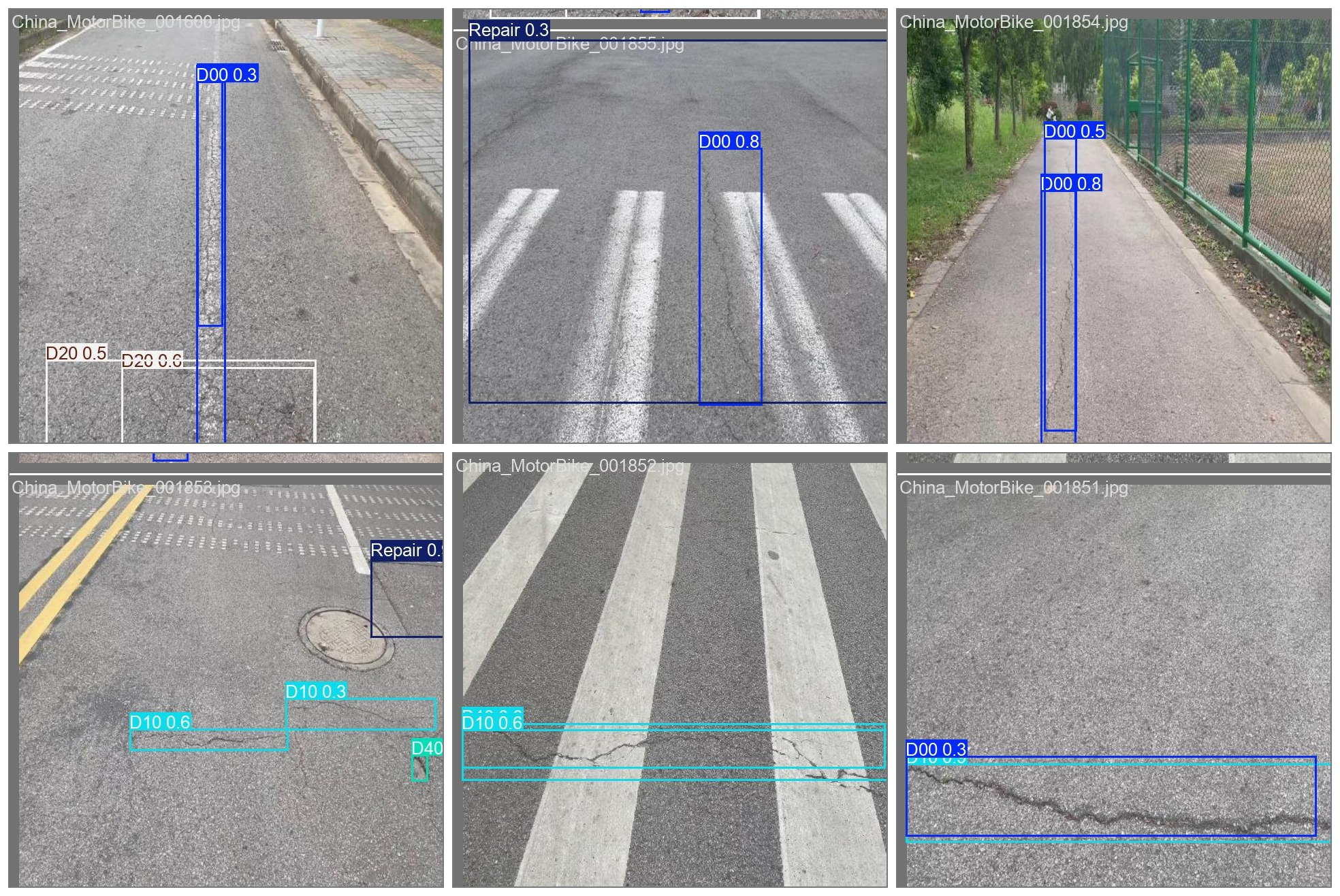 图3 YOLOv11L道路病害检测可视化结果
图3 YOLOv11L道路病害检测可视化结果
图3选取6张验证图像组成可视化结果,覆盖裂缝、网裂/龟裂、坑槽和修补区域等目标。模型能够在同一图像中输出多个检测框,并给出类别与置信度。对边界较明显的坑槽和修补区域,框选较直观;对细长裂缝,模型能找到大致位置,但框体可能偏宽或偏长。该结果说明,YOLOv11L可用于道路检查初筛,但仍应由养护人员结合原图确认重点病害。
5 应用讨论
从道路检查流程看,模型结果更适合进入“初筛—复核—入库”环节。首先由模型从大量巡检图像中筛出疑似裂缝、坑槽和修补区域;然后由人工复核高风险目标;最后将确认后的病害与道路桩号、GPS坐标和巡检时间关联,形成可追溯记录。这样既能减少人工逐图查看的工作量,也能避免模型误判直接进入维修决策。
后续改进可集中在三方面:一是增加坑槽和修补区域样本,缓解类别不均衡;二是补充夜间、雨天、阴影遮挡等复杂场景,增强泛化能力;三是结合分割或面积估计方法,提高病害边界量化水平。
6 结论
本文基于2000张道路表面图像训练YOLOv11L模型,对纵向裂缝、横向裂缝、网裂/龟裂、坑槽和道路修补区域进行检测。实验结果表明,模型在第100轮取得较优结果,Precision、Recall、mAP@0.5和mAP@0.5:0.95分别为66.21%、71.58%、75.40%和50.12%。结合训练曲线、PR曲线和可视化结果可知,YOLOv11L具备道路检查图像初筛能力,但在细长裂缝定位和少样本类别识别方面仍需优化。
总体看,该方法可为道路检查提供自动识别基础。实际应用时,应继续扩充本地道路样本,并将模型输出与人工复核、道路桩号和养护记录结合,以提高结果可靠性。
参考文献
[1] 侯勇严, 梁扩旺, 郭文强, 等. 基于改进YOLOv8的路面病害检测模型[J]. 陕西科技大学学报, 2025, 43(3):166-173.
[2] 殷波. 基于RCGELAN-YOLOv11的路面损伤检测算法[J]. 人工智能与机器人研究, 2026, 15(1):27-37.
[3] Zhang L, Deng Y, Zou Y. Automatic road damage recognition based on improved YOLOv11 with multi-scale feature extraction and fusion attention mechanism[J]. PLOS One, 2025, 20(9): e0327387.
[4] Lin J, Wang P, Ruan Y, et al. YOLO11L-WLBS: an efficient model for pavement defect detection[J]. Scientific Reports, 2026, 16:5284.
于跃1,于洋1,郑雨晴1,邹津婷1,卢甜甜*,
1.长春大学旅游学院人工智能学院,2.吉林农业大学信息技术学院
 冀公网安备 13010802000382号
冀公网安备 13010802000382号